Innovations en désherbage : quatre techniques évaluées par les Digifermes d'Arvalis

La phase d’interculture est importante dans la gestion des adventices et dans la limitation du stock semencier. Si le déchaumage, le faux-semis et le broyage sont largement développés, ils ne se suffisent pas toujours à gérer les vivaces problématiques ou à détruire les couverts, notamment, dans des systèmes de cultures sans labour.
Le désherbage électrique pourrait apporter un levier supplémentaire. Depuis quelques années, le principe est repris par le constructeur Zasso. Arvalis a réalisé des mesures sur la Digiferme(1) de Saint Hilaire-en-Woëvre (55), à l’automne 2018 et au printemps 2019 sur des repousses de céréales, des couverts et des prairies. À l’automne 2019, une dernière série de mesures a été réalisée en destruction de couverts. L’objectif est de déterminer l’efficacité de cette solution comparée au glyphosate et de préciser ses modalités d’utilisation et son impact sur la faune. Il ressort de ces premiers essais que l’efficacité varie en fonction de l’espèce et de la biomasse de l’adventice, mais aussi de l’humidité du sol et des plantes ainsi que de la vitesse d’avancement du tracteur(2)
Contrôler le bon alignement des graines avec la technologie Geoseed de Kverneland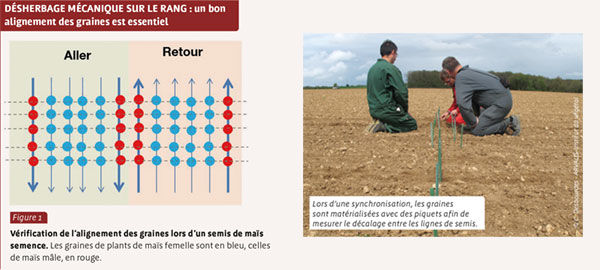
Le semoir fait un premier passage puis commence le retour sur quelques mètres. Les graines des deux passages de semoirs sont alors découvertes, sans les déplacer. L’objectif est de vérifier que les graines sont bien alignées sur la ligne de semis, que l’alignement est conservé entre chaque aller-retour de semoir, et enfin que les lignes sont bien perpendiculaires au sens d’avancement du tracteur. S’il y a un décalage entre les deux lignes de semis, il faut intégrer cette information à la console qui la prendra en compte pour mieux « synchroniser » les passages. Cette synchronisation est toutefois assez compliquée à effectuer sur le terrain. Avec ce semoir, il est aussi possible de semer les graines en pointe de diamant.
La robotique au service du désherbage mécanique en grandes cultures

Concernant le désherbage mécanique, certains robots conçus pour le maraîchage ont une architecture (roues, autonomie...) leur permettant d’intervenir dans des parcelles de grandes cultures - bien que la réglementation actuelle interdise de laisser un matériel se déplacer seul dans une parcelle et limite sa vitesse de déplacement à 6 km/h. Dans tous les cas, les débits de chantier sont faibles en raison de la vitesse relativement faible des robots et de leur largeur de travail réduite.
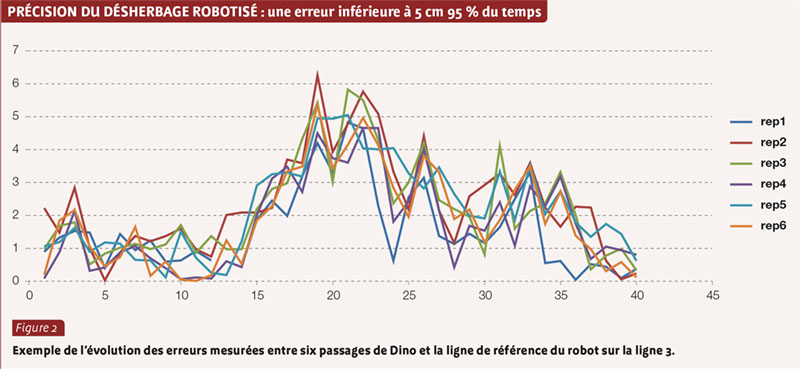
En 2018 et 2019, le robot Dino du constructeur Naïo Technologies a été évalué sur la Digiferme de Saint Hilaire. Bien que non développé pour les grandes cultures, ce robot déploie des technologies transférables à celles-ci. Ont ainsi été testés l’aptitude du robot à se guider et l’intérêt à multiplier les passages pour biner les inter-rangs de cultures de blé, d’orge de printemps et de maïs. Le guidage par caméra RVB de l’outil n’a pas été testé, la caméra n’étant pas paramétrée pour suivre les rangs des cultures étudiées (blé, orge de printemps et maïs).Pour évaluer le guidage RTK du robot, une antenne RTK « mouchard » a été positionnée sur ce dernier à l’aplomb de l’outil (une bineuse), afin d’évaluer l’erreur de positionnement du robot par rapport aux lignes enregistrées lors du semis. Ce test a été réalisé sur une surface bétonnée et plane : c’est donc le potentiel de précision maximale atteignable dans des conditions idéales qui a été mesuré, à différentes vitesses de travail. Dans 95 % du temps, l’erreur de positionnement du robot est de ±5 cm (figure 2).
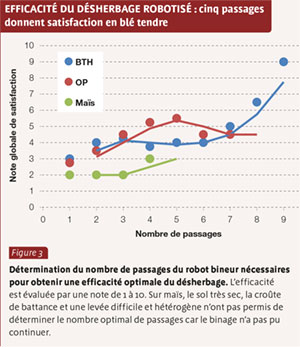
Cette erreur conditionne l’inter-rang minimal nécessaire pour que les roues du robot n’écrasent pas la culture ainsi que la distance minimale entre le rang et les éléments de binage. Le robot est passé jusqu’à neuf fois dans les cultures. En blé tendre d’hiver, la fréquence optimale de passages du robot - celle qui permet d’atteindre l’efficacité optimale par rapport au rendement - semble être de cinq passages. En maïs, le nombre de passages testé (quatre au plus) n’a pas été suffisant pour déterminer l’optimum (figure 3).
Le semis à alignement transversal facilite le désherbage mécanique du maïs
Le maïs présente l’avantage d’être semé à grand écartement, ce qui facilite le passage d’une bineuse dans l’inter-rang. Toutefois la gestion des adventices sur le rang est toujours difficile à maîtriser, malgré l’utilisation d’équipements spécifiques comme les doigts Kress ou les éléments des roto-étrilles. Certains semoirs monograine peuvent semer avec un écartement constant sur le rang et l’inter-rang en synchronisant les éléments semeurs entre eux. Cette technique permet d’envisager un désherbage mécanique à la fois dans le sens du semis et perpendiculairement à celui-ci. La surface désherbée est alors proche de 100 %.
Des tests de faisabilité technique ont été réalisés sur la Digiferme de Boigneville en 2019 afin de vérifier la synchronisation des éléments semeurs entre un aller et un retour (encadré). L’aptitude du semoir à rester synchronisé entre deux passages éloignés dans le temps a également été étudiée. Le semis réalisé avait un écartement de 50 cm entre rangs et de 25 cm entre pieds (densité de semis de 80 000 pieds/ha). À la levée, le géoréférencement de 648 pieds de maïs dans la parcelle a permis de calculer la précision de l’implantation de chaque pied de maïs. Les résultats montrent une erreur moyenne de 2,6 ± 0,8 cm par rapport à un quadrillage parfait - une précision proche de la précision du signal de géopositionnement RTK utilisé pour le semis. La synchronisation s’est donc bien passée, mais elle est contraignante à réaliser.
Ces points géoréférencés permettent aussi de calculer le nombre de pieds qui seraient supprimés lors du binage transversal et de s’assurer que le binage est possible. Il s’avère que le binage perpendiculairement au sens du semis est techniquement réalisable. Cependant les roues d’un tracteur ne passent pas dans 25 cm – la distance entre chaque pied dans notre test. Dans le cadre de l’architecture de semis implantée pour le test, cette technique reste donc envisageable pour la gestion des débuts et fins de parcelle : aux endroits où la bineuse, dans le sens conventionnel de passage, n’atteint pas la vitesse optimale pour une bonne efficacité des éléments travaillant (dents, doigt Kress, roto-étrilles). Ces tests, financés par la FNPSMS, seront reconduits en 2020.
La localisation des adventices, un enjeu important

Les nouvelles technologies ouvrent aussi des pistes intéressantes en désherbage chimique localisé. Le robot de chez Ecorobotix a été une des premières solutions d’application ultra ciblée testée par les Digifermes en 2018 sur betteraves et prairies. Les résultats obtenus avec la première version de ce robot sont toutefois obsolètes. Une nouvelle version, plus prometteuse, n’est cependant pas encore disponible pour de nouveaux tests. Ce constat montre la rapidité de l’évolution des matériels et l’intérêt pour les start-up à travailler en partenariat avec le réseau des Digifermes.
Arvalis a aussi évalué les enjeux d’une application localisée à l’aide de matériel plus classique sur chardon sur la Digiferme de Boigneville (91). Cette vivace, qui se développe en taches, est contrôlable à des stades avancés. Elle est donc bien adaptée à une application « on/off » utilisant des coupures de tronçons classiques(3).
Pour les besoins de l’étude, les zones de chardons ont été géoréférencées manuellement pour supprimer les biais liés à la détection, puis cette carte de préconisation est entrée dans le pulvérisateur de l’exploitation : un porté de 24 m avec des tronçons de 2 m (Tecnoma Maxis, console iTop). L’objectif est de valider la possibilité d’appliquer cette carte avec un pulvérisateur et de mesurer les quantités économisées par rapport à une application en plein. Sur la parcelle d’essai de 4,5 ha, la commande des tronçons a respecté la carte de préconisation, et 88 % de produits ont été économisés.
Toutefois, pour un agriculteur, localiser manuellement des adventices est infaisable sur de grandes parcelles. Différents couples capteur-vecteur existent pour remplacer les relevés manuels. Parmi les solutions envisageables, les images satellites n’offrent pas actuellement une définition suffisante si des adventices de petite taille sont visées. Arvalis a donc testé sur la Digiferme de Saint Hilaire une cartographie des adventices à l’aide d’un drone doté d’une caméra multispectrale et/ou RGB prenant des images successives de la parcelle.
Les images sont ensuite assemblées avec une grande précision pour constituer une mosaïque d’images. La précision absolue est essentielle pour retrouver l’emplacement des adventices, l’objectif étant de rentrer cette carte dans un pulvérisateur (encadré). Pour faciliter cette opération, des cibles sont placées au sol : cinq sur une parcelle de 20 ha pour pouvoir recaler les images. Pour valider la localisation, les adventices d’une dizaine de placettes sont localisées précisément (RTK). Lorsque la mosaïque d’images est superposée à ces références, certaines adventices s’avèrent se superposer alors que d’autres sont décalées jusqu’à 70 cm (figure 4).
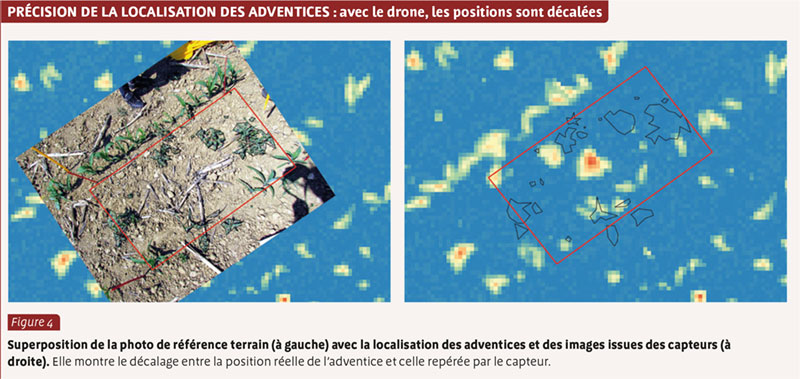
Réalisé sur plusieurs années, ce test montre que la précision absolue des images obtenues pour localiser les adventices n’est pas encore suffisante. Certaines sociétés réalisent des tests avec des drones en précision RTK, mais le tarif de l’heure de vol est encore prohibitif. De plus, le capteur multispectral utilisé ne détecte pas les adventices de moins de 3 cm. De même, les adventices localisées sur le rang de la culture étaient assimilées à du maïs. Si les rangs de la culture peuvent être « supprimés » de la carte, les rangs orientés différemment (la fourrière) ne le peuvent pas. Or ces zones sont généralement les plus infestées. Des tests en 2020 évalueront des capteurs localisés sur tracteur avec une application d’herbicide différée. Cependant, ces technologies ne seront utilisables qu’à condition d’avoir des solutions curatives efficaces (herbicides foliaires).
De plus, au-delà de la localisation d’une adventice proprement dite, les capteurs fournissent différents niveaux d’informations : présence/absence d’adventices, famille (graminée/dicotylédone) et enfin, identification exacte. Ces différents niveaux de caractérisation ne permettent pas d’envisager les mêmes applications.
(1) Les Digifermes sont un réseau de fermes expérimentales qui défendent une vision de l’agriculture numérique et connectée répondant aux besoins des producteurs. Pour en savoir plus : https://digifermes.com/.
(2) Les essais réalisés sur la Digiferme de Saint Hilaire-en-Woëvre sont financés par la région Grand Est. Les résultats de ces essais ont été analysés dans l’article « Le désherbage électrique : une efficacité dépendant de nombreux facteurs », Perspectives Agricoles n°476, avril 2020.
(3) Plus d’informations dans l’article « Désherbage par tache en maïs : un gain considérable de produit », Perspectives agricoles n°473, janvier 2020.
Les applications localisées exigent une très bonne précision absolue
La détection des adventices et l’application simultanée d’herbicide pose la question de la quantité de bouillie à préparer et à emporter. Cette technique nécessiterait donc un équipement d’injection directe pour être opérationnelle. Concernant la précision de l’application, le logiciel connaît la distance entre les capteurs et les buses : il peut donc ouvrir les buses correspondant aux capteurs qui ont détecté les adventices sans connaître précisément leurs positions absolues. La limite réside donc actuellement dans le temps de traitement des images, mais pas dans la précision de l’application.
Lorsque la détection et l’application n’ont pas lieu en même temps, il faut que l’adventice soit parfaitement localisée pour pouvoir être pulvérisée un autre jour. Le GPS assure cette localisation mais sa précision dépend de la correction choisie. Avec la plupart des corrections gratuites (le plus souvent utilisées sur les pulvérisateurs), la précision absolue est de l’ordre du mètre. Dans ce cas, ce cas, la buse qui s'ouvre risque de ne pas être la bonne. Cette erreur peut être prise en compte lors de la création de la carte entrée dans la console du pulvérisateur (en élargissant la zone à pulvériser), mais l’économie de produit sera moins importante - et ce, d’autant plus que les zones d’adventices seront de petites tailles. Pour optimiser l’application, une précision centimétrique est impérative tant pour la détection que pour l’application : idéalement une correction RTK, ou sinon PPP (type RTX Center Point Fast de Trimble ou SF3 de John Deere). Une précision moindre n’est pas souhaitable, à moins que le matériel n’intègre le recalage sur un point et non pas uniquement sur la ligne de guidage. En effet, si cette dernière action élimine l’erreur dans le sens droite/gauche, elle ne la supprime pas dans le sens avant/arrière.
-

Au 10 mars 2026, le risque maladies sur blé tendre est plus élevé qu’en 2025. Le point sur...
-

L’arrivée de buses à injection d’air encore plus performantes en termes de réduction de...
-

Avec l’arrêt du trafic dans le détroit d’Ormuz, l’agriculture est touchée par les...



0 commentaire
Réagissez !
Merci de vous connecter pour commenter cet article.