Le T2.5 à l’épreuve d’une exploitation lorraine
Les porte-outils automatisés et autonomes apparaissent comme une solution pour résoudre un problème de main-d’œuvre. Arvalis a testé l’AgBot T2.5 d’AgXeed sur la Digiferme de St Hilaire-en-Woëvre (55) dans le cadre du projet européen AgRoboConnect.

Le porte-outil thermique autonome T2.5, d’une puissance de 156 cv et d’un poids de 9,2 tonnes, est doté de chenilles à entrainement électrique d’une largeur de 610 mm. Arvalis-Lorraine l’a testé durant une année complète sur l’ensemble des interventions culturales (figure 1) avec les matériels habituellement utilisés sur la ferme.
Interventions culturales réalisées par le T2.5 en 2025
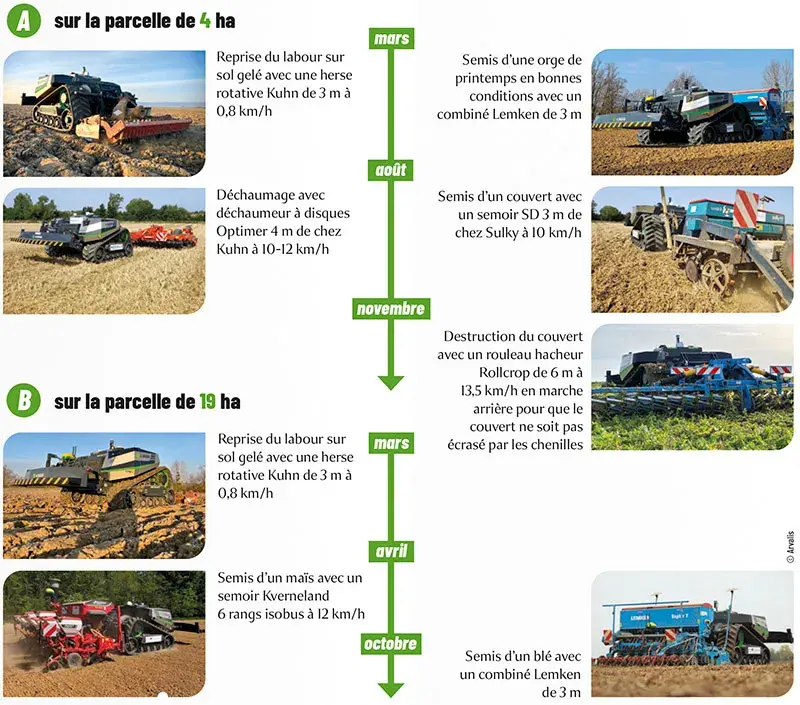
Les travaux ont été réalisés sur deux parcelles situées à proximité des bâtiments d’exploitation pour faciliter son déplacement (car il est interdit sur la route) : une parcelle de 4 ha pour observer son comportement sur de petites longueurs, et une de 19 ha présentant des types de sols contrastés, incluant une mouillère et des pointes.
Une vraie autonomie sur les parcelles
Avant toute utilisation, une personne équipée d’un GPS piéton agréé par la société AgXeed a délimité les zones de circulation du T2.5. Cette personne reste responsable en cas d’incident. Le robot ne pourra pas dépasser cette limite, définie virtuellement et transférée vers la plateforme de gestion du matériel, qui permet de déclarer la largeur, le point de contact avec le sol, etc. Cette interface intuitive permet de valider les trajets du T2.5 dans chaque parcelle.
Sur l’ensemble des interventions (outil porté, outil trainé, outil isobus, travail en marche arrière), le porte-outils est réellement autonome sur sa ligne et ses demi-tours. Son réservoir de 300 L lui fournit une autonomie jusqu’à 18 h. La présence d’un opérateur au champ reste nécessaire quand les lidars détectent un obstacle : oiseau devant le robot, dérive trop importante de sa ligne dans la mouillère, ou poussières.
Les tests révèlent un problème de puissance pour les interventions utilisant la prise de force. Un exemple l’illustre : avec une herse rotative, un tracteur de puissance équivalente aurait travaillé avec un outil de 4 m, tandis que le robot n’a utilisé qu’une herse de 3 m. Sur l’ensemble des interventions, le débit de chantier moyen a été inférieur de 20 % par rapport à un tracteur de référence, avec une consommation de carburant supérieure de 50 %.
Le robot tasse moins
Les mesures de résistance du sol réalisées au pénétromètre montrent que le tassement est supérieur pour le tracteur de 135 CV, intermédiaire pour le T2.5 (malgré ses 1,7 tonnes de plus).
Ces différences sont significatives en surface mais pas sur l’ensemble du profil. Malgré des conditions limites (semis d'orge en conditions humides), les chenilles du T2.5 tassent moins la surface du sol sur les sept premiers centimètres.
Afin de mesurer la précision du guidage, une antenne mouchard RTK a été installée sur le robot et sur l’outil pour chaque intervention. Lors du semis de maïs, par exemple, la précision moyenne du robot est de ±2,5 cm en pass to pass (précision entre un aller et un retour de tracteur) et de ±6 cm dans 95 % du temps. Au niveau du semoir, la précision est légèrement supérieure, car lorsque le semoir est en terre, son inertie au contact du sol l’empêche de suivre les erreurs de trajectoire du robot.
Des économies de temps et de main-d’œuvre mais moins de marge
Une évaluation multicritère (économique, social et environnemental) a été réalisée à l’aide du logiciel Systerre sur une exploitation représentative des systèmes de polyculture-élevage en Lorraine : 250 ha pour 1,6 unités de travail humain (UTH), avec des cultures incluant prairie (1/3), blé (1/3), colza, orge de printemps et orge d’hiver. Les coûts d’intrants et les prix de vente sont lissés sur trois ans (2020-2023). C’est une exploitation qui a peu de matériel et recourt souvent aux Cuma locales.
L’intégration du T2.5 a nécessité un investissement de 240 000 euros HT, comprenant l’entretien et une subvention de 40 %. Il réalise toutes les interventions à l’exception du labour : le travail du sol, le broyage de résidus, le fauchage et le fanage sur les prairies, et les semis de maïs, de céréales et des couverts. Avec environ 500 heures d’utilisation par an, un tracteur de 160 cv a été supprimé, et la main-d’œuvre réduite à 1,3 UTH.
Pour tenir compte des contraintes observées sur le terrain, un temps de chargement/déchargement moyen de 15 min par parcelle (d’environ 15 ha) est intégré. Une surveillance d’une minute par hectare et, pour les semis, un rechargement de trémie de 15 minutes pour 3,5 ha ont été intégrés, de même que le débit de chantier réduit de 20 % et la surconsommation de +50 %.
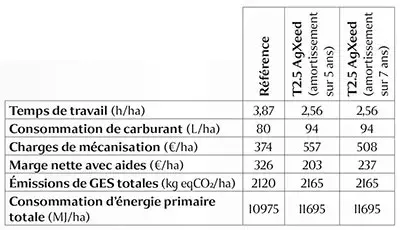
Sur l’ensemble de l’exploitation (tableau 1), l’autonomie du T2.5 permet de réduire le temps de travail de 3,87 à 2,56 h/ha ; par contre, la consommation moyenne de carburant augmente de 17 % par rapport à la consommation de référence. Malgré la vente d’un tracteur, les charges de mécanisation augmentent : de 49 % avec un amortissement à 5 ans, et de 27 % à 7 ans. De fait, la marge nette chute. Côté environnement, les émissions de GES et la consommation d’énergie primaire connaissent également une légère hausse.
Indicateurs de performance multicritères
Résultats et limites
Après une campagne d’utilisation, le T2.5 se révèle un porte-outil offrant une réelle autonomie et un gain de temps pour l’agriculteur. Il faut cependant rester à proximité pour intervenir en cas d’incident. À ce stade, le manque de connectivité avec les outils (caméra, capteur…) limite la surveillance à distance.
La rentabilité pourrait s’améliorer avec une augmentation de la surface de l’exploitation. Cependant le T2.5 ne peut embarquer que des outils de 3 m, et le nombre de jours disponibles doit permettre de couvrir toutes les parcelles. En Lorraine, sur 250 ha, le T2.5 est saturé et ne pourrait pas intervenir sur des surfaces plus importantes, en particulier pendant les semis automnaux.
Vidéo « La robotique & le numérique au service du désherbage »
-

Le Grand Défi « Robotique agricole » a été lancé par l’État en 2023. Son coordinateur...
-

Comme dans de nombreux secteurs d’activités, l’agriculture connaît un développement de l...
-

De nouvelles technologies autonomes émergent, combinant robotique mobile, capteurs...
-

La robotisation se développe en grandes cultures. Face aux défis de la pénurie de main-d...
-

Grâce à leur précision et leur autonomie, les porte-outils automatisés apparaissent comme...





0 commentaire
Réagissez !
Merci de vous connecter pour commenter cet article.